
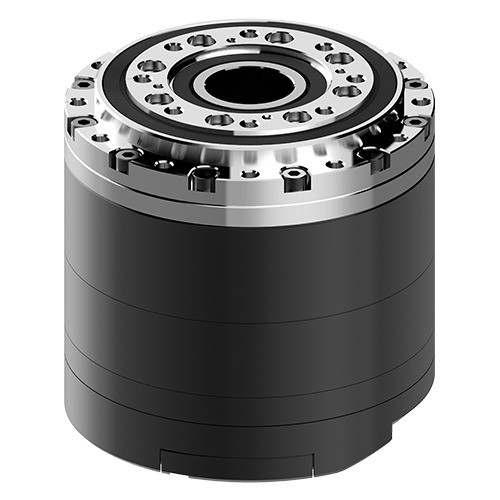
Dynamixel YM080-230-R051-RH





Prices incl. GST
Delivery time 7-14 Workdays
- Product Code: ROBT-902-0202-000
- MPN: 902-0202-000
YM080-230-R051-RH is an all-in-one robot actuator with a built-in cycloidal reducer, specifically the DYNAMIXEL DRIVE (DYD) DYD-17H-099 model.
DYNAMIXEL DRIVE (DYD) cannot be replaced after purchasing the product.
High Performance Frameless Motor with Hollow Shaft
Torque control based on current sensing
PID control to enhance position, speed reliability and accuracy
The integrated absolute magnetic encoder and replaceable battery allow multi-turn position information to be retained
even after complete power-off (with back up battery).
Metal housing for high durability
Modular configuration makes it easy to create applications of varying degrees of freedom

| Products | Qty. | Note |
| YM080-230-R099-RH | 1 | DYNAMIXEL-Y(R-option) |
| Robot Cable-2P-X4P 600mm(Convertible) | 1 | RS485 2P-4P Cable(MOLEX-JST) |
| Robot cable-2P 600mm | 1 | RS485 2P Cable(MOLEX-MOLEX) |
| Cord End Terminal(L14/P8) | 4 | For power connection |
| Terminal Plug(39500-0002) | 2 | For power connection |
| Wrench Bolt WB M3X20 | 14 | For Output shaft assembly |
| Wrench Bolt WB M4x10 | 10 | For frame assembly |



- Please be aware of different operational voltage from other DYNAMIXEL series (Operational voltage: 24V).
- Please refer to the drawings provided online when combining with other power transmission products.
- This product is designed as an integral unit; the cycloidal reducer and motor cannot be separated for individual use.
- Please be cautious of overheating during prolonged high-speed usage.
- Please use a frame that matches the screw length considering the depth of the tabs indicated in the drawing.
- After purchasing the product, ensure to connect the multi-turn backup battery before use.
- Please refer to the drawings when combined with various products such as reducers, linear actuators, and
servo cylinders depending on the intended purpose.
- For additional precautions, please refer to the e-manual.
| Model Name | YM080-230-R099-RH | |
|---|---|---|
| Series | DYNAMIXEL Y | |
| MCU | ARM Cortex-M4 (168 [Mhz], 32 [bit]) | |
| Input Voltage | Min. [V] | - |
| Recommended [V] | 24.0 | |
| Max. [V] | - | |
| Performance Characteristics | Voltage [V] | 24.0 |
| Stall Torque [N·m] | - | |
| Stall Current [A] | - | |
| No Load Speed [rpm] | 32.2 | |
| No Load Current [A] | - | |
| Continuous Operation *) | Voltage [V] | 24.0 |
| Torque [N·m] | 26.0 | |
| Speed [rpm] | 20.2 | |
| Current [A] | 10.7 | |
| Resolution | Resolution [deg/pulse] | 0.0000069358 |
| Step [pulse/rev] | 51,904,512 | |
| Angle [degree] | 360 | |
| Position Sensor | Contactless absolute encoder (19Bit, 360 [deg]) Multi-turn (18Bit, 262,144 [rev], Battery back up) | |
| Operating Temperature | Min. [°C] | -5 |
| Max. [°C] | 55 | |
| Motor | Frameless BLDC | |
| Baud Rate | Min. [bps] | 9,600 |
| Max. [bps] | 10,500,000 | |
| Control Algorithm | PID | |
| Gear Type | Cycloid | |
| Gear Material | Metal | |
| Case Material | Metal (Plastic Bottom) | |
| Dimensions (WⅹHⅹD) [mm] | D80 x 78.1 | |
| Dimensions (WⅹHⅹD) [inch] | D3.14 x 3.07 | |
| Weight [g] | 1,200.00 | |
| Weight [oz] | 42.33 | |
| Gear Ratio | 99:1 | |
| Backlash [arcmin] | < 3.0 | |
| Backlash [deg] | - | |
| Command Signal | Digital Packet | |
| Protocol Type | Half duplex Asynchronous Serial Communication (8bit, 1stop, No Parity) | |
| Link (Physical) | RS-485 Multidrop Bus | |
| ID | 0 ~ 252 | |
| Feedback | Position, Velocity, Current, Temperature, Voltage, etc | |
| Protocol version | Protocol 2.0 | |
| Operating Mode / Angle | Current Control mode:Endless turn Velocity Control mode:Endless turn Position Control Mode : ±1,323 [Rev] | |
| Output [W] | 230 | |
| Standby Current [mA] | 40 | |
